
Characterizing a DC motor
Testing how the speed and torque of a small DC motor depend on the frequency of the PWM signal.
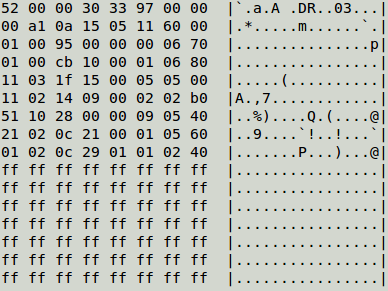
Dumping an external EEPROM
Using an Arduino Uno to stream the contents of an EEPROM to a computer for capturing.

Dive Computer Teardown - Versa Pro
Teardown and reverse engineering of the Oceanic Versa Pro.

Dive Computer Teardown - Genesis ReSource
Taking a look at the guts of a computer designed to work over 100 ft underwater.

DIY Suunto Vyper Data Cable
Replacing an $85 cable with less than $15 in parts.
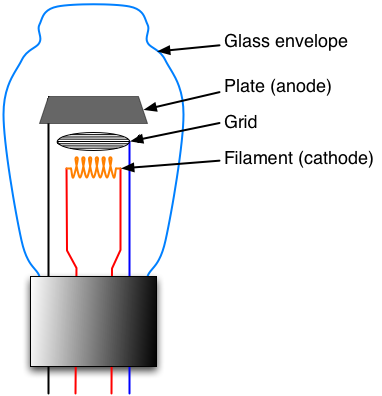
Tube Based Night Light
A simple demo circuit using a vacuum tube as an electronic switch.

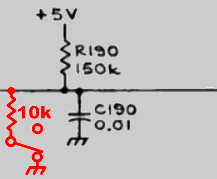
Building an inverting charge pump
Combining 5 volts and PWM to create -25 volts.
Writing drivers for a Dot-Matrix LCD Display
Bit banging all over the place

Reverse Engineering an LCD dot-matrix display
Breathing new life into a screen salvaged from a Smith Corona electric typewriter.

Electronic Load
For when you need a really fancy resistor.

PHYS3098: Circuits
Teaching circuits to undergrads. From Ohm’s law to opamps and microcontrollers.
Teaching an old scope new tricks.
Modding an old Tek scope to have a manual switch for controlling the x10/x1 indicator light.
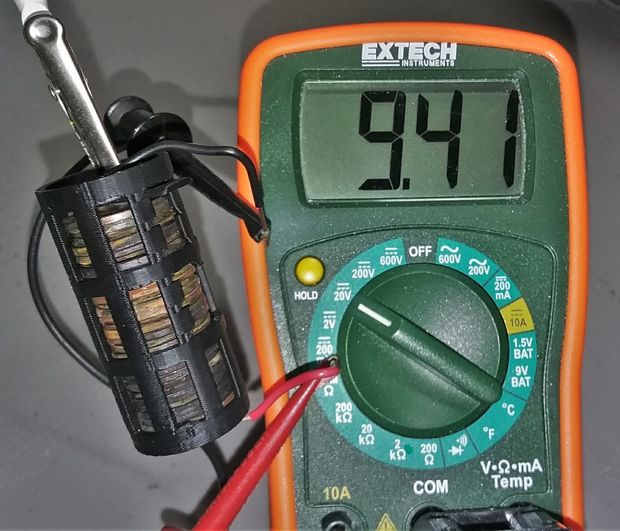
Voltaic Pile
One day I decided to play around with potato batteries, a week later I had constructed a 10 cell voltaic pile in a 3D printed enclosure.

Lists of Top 100 Books
Find the most recommended books and authors by merging lists of top 100 books.

Joule Thief
Learning analog electronics with a simple voltage booster.